

Yes, 3-D printers are taking over the world, so I guess it’s no surprise that engineers are now using them to create robots. This week, researchers at Harvard University and the University of California, San Diego unveiled a 3-D-printed robot that is not only capable of repetitive jumps, it can also withstand most falls. The robot’s design and testing is described in a paper published in the journal Science, and can be enjoyed in the video below.
Until now, robots have been primarily manufactured from aluminum and steel. These rigid metal robots are incredibly precise, but are complex and costly, as well as potentially hazardous to the people that work with them. More recently, engineers began to design robots with soft bodies. But, while so-called “soft robots” are safer and more resilient, they are typically very slow and difficult to manufacture and control.
So, for this design, the engineers looked to nature, hoping to combine the best of the hard and the soft robots. In the natural world, some squids and mussels have characteristically soft, shall we say “squishy” tissues, as well as hard, stiff ones — like the mussel’s foot or the squid’s beak. And without breaking or tearing, the soft tissues in these animals interact with and gradually become the rigid foot or beak.
As with nature, the top half of this newly designed robot has different layers of stiffness. This “gradient material” is soft and flexible on the outside, while gradually gaining a hard, rigid core. It was printed as a single piece and it provides a frame around its circuit board, power source, air compressor and other vital rigid controls. The more flexible exterior allowed the robot to land safely and keep its internal components safe. Indeed, in experiments, the robot was able to survive multiple 4-feet falls and jump up to 100 times in a row. A laudable achievement for a robot.
“The wonderful thing about soft robots is that they lend themselves nicely to abuse,” reported Nicholas Bartlett, first author of the paper and a graduate student in the School of Engineering and Applied Sciences at Harvard University.
The bottom half of the robot is soft and flexible and holds a chamber where butane and oxygen are mixed and ignited, causing the chamber to rapidly expand and the robot to be propelled up into the air. In tests, the robot was able to jump up to six times its body height (up to 2.5 feet). And to control the direction of the jump, the engineers designed the robot so that one or two of its three legs can be expanded with air, just before the igniting spark.

By 3-D-printing the body of the robot in one piece that has multiple layers, the engineers developed a more efficient robot. Gone are the joints and sliding parts that are prone to damage, dirt and debris. And because it was largely manufactured by the 3-D printer, the robot can be created relatively quickly and cheaply.
“In nature, complexity has a very low cost,” reported Michael Tolley, an assistant professor of mechanical engineering at UC San Diego, and one of the paper’s lead authors. “Using new manufacturing techniques like 3D printing, we’re trying to translate this to robotics.”
In an email, Bartlett said he sees their strategy of 3-D printing these gradient materials, “as a robust way of interfacing between hard and soft components, reducing stress concentrations and improving system level performance. But even beyond soft robotics,” he said, “this strategy is relevant for any engineered structure that consists of both hard and soft materials, and we are excited to see what can be done in this regard.”
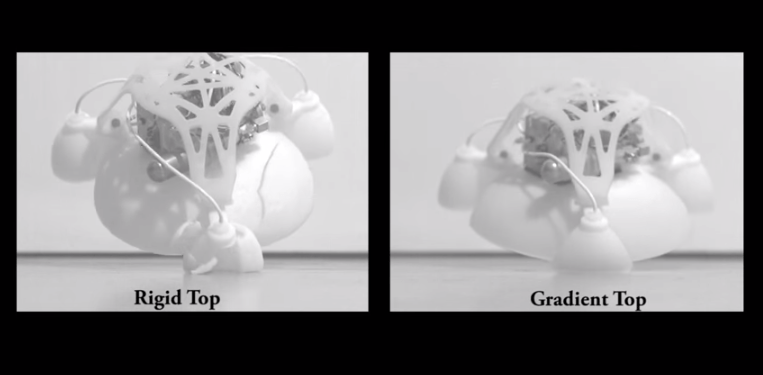
So, check it out for yourself. In the first part of the video, labeled “Impact Comparison,” you can see how an initial fully-rigid top leads to a fracture, whereas the newer gradient material allows the robot to survive. The rest of the sections demonstrate the robot’s impressive jumping abilities.
