
A novel design for robots allows them to “sweat”, greatly improving thermal and mechanical integrity. The bot from SCHAFT was a top scorer in the DARPA Robotics Challenge Trials in 2013.
The University of Tokyo’s JSK Lab’s Kengoro is a 1.7-meter (5.6 feet) tall, 56-kilogram (123 pounds) musculoskeletal humanoid crammed to the brim with circuit boards and 108 motors. These structural components generate a lot of heat which would constrain the bot’s performance, and there wasn’t much room for any cooling mechanisms. The researchers coped with this by comparing it to our own—sweat.

JSK lab developed Kengoro’s 3-D frame to be porous, capable of maintaining a system of flowing water. The frame is made of laser-sintered aluminum filled with channels like that of a sponge. A cup of deionized water keeps Kengoro running for about half a day, and needs to be kept “hydrated” throughout the day.
“Usually the frame of a robot is only used to support forces,” lead author Toyotaka Kozuki told Spectrum. “Our concept was adding more functions to the frame, using it to transfer water, release heat, and at the same time support forces.”
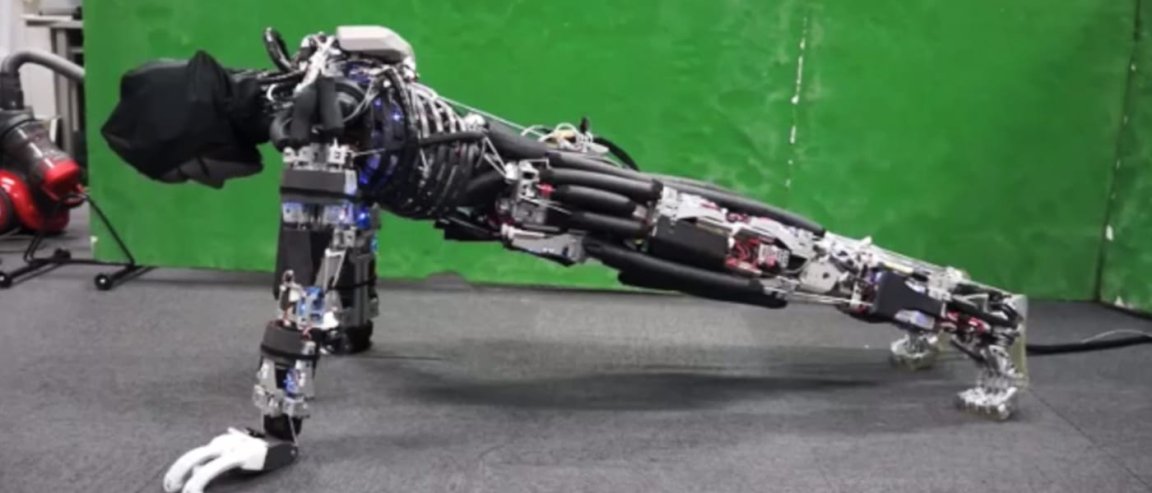
JSK reports that the cooling technology is three times better than air cooling, but falls short of the efficiency of a traditional radiator using active cooling. It has allowed Kengoro to run at full power for longer, and the bot can even do push-ups for 11 minutes straight without exhausting its design.