
Robo-Rescuers
Sangbae Kim, an associate professor of mechanical engineering at MIT, has a very distinct vision for the future of emergency response. Amid advances in AI and robotics, he believes that the field would be best served with animal-like machines that can serve as first responders to disaster situations.
Born in Seoul, South Korea, Kim attended Yonsei University where he took up mechanical engineering before serving in the Korean military. From there, he returned to university life, where he explored his love for robotics.

One particular class project challenged students to create robots that could perform specific tasks. He cites it as the catalyst that propelled his career in robotics forward, which eventually took him to Stanford University to complete a graduate program for mechanical engineering.
It was there that he began work on his bio-inspired robotic machines, the first of which was a climbing robot that mimicked the gecko. At Harvard University, where he found himself in a postdoc post, he helped engineer the Meshworm, designed to mimic the movement of earthworms.
Despite his success in small robots, he realized that its size prevented it from doing “real, physical work.” And it was then that he began to develop a four-legged machine designed to complete human-level physical tasks—a dream that he nurtured when he joined MIT’s Department of Mechanical Engineering and established the Biomimetic Robotics Lab.
Biomimetic Robots
MIT’s Biomimetic Robotics Lab’s goal is to design biologically inspired robots that can complete high-level tasks.
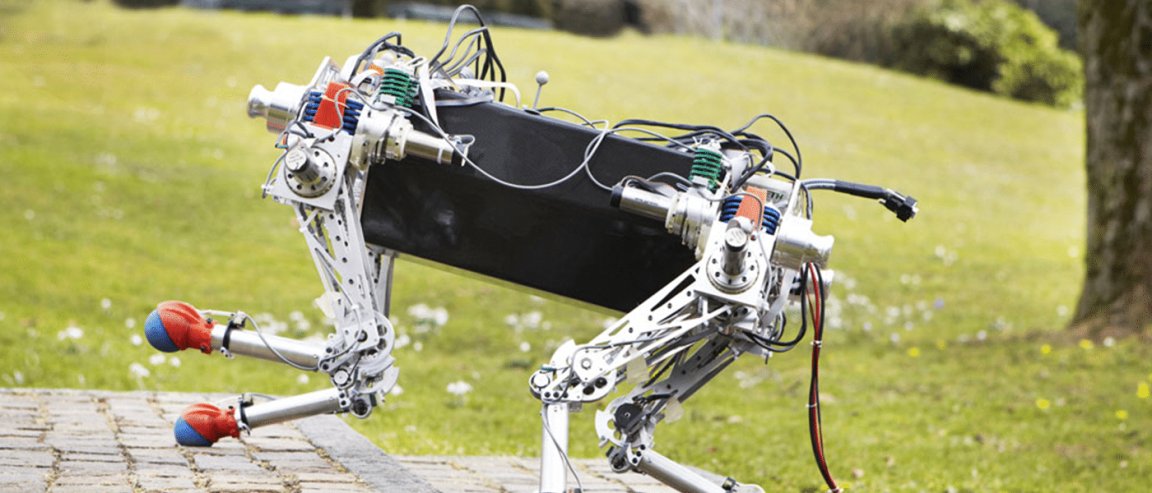
At the forefront of this objective is the MIT Cheetah, a four-legged robot inspired by the fastest land animal. Powered with electronic motors, it can run, jump over obstacles autonomously, and trot at 14 miles per hour. The speed the team has achieved for this particular machine is already much faster than what animals in nature can do, and it’s proof of how much more the team can accomplish.
Right now, he’s trying to combine two major projects, one being the MIT Cheetah, and the other, the HERMES, a tele-operated robot on hind legs, whose movements and balance are controlled by a human operator, to create a robust machine that could help save lives in disaster and emergency situations.
“Say there are toxic gases leaking in a building, and you need to close a valve inside, but it’s dangerous to send people in,” Kim says. “Now, there is no single robot that can do this kind of job. I want to create a robotic first responder that can potentially do more than a human and help in our lives,” MIT writes.
By combining principles across biomechanics, human decision-making, and mechanical design, such a robot could easily manuever itself through debris, cross minefields, enter buildings on fire, or punch through walls. And Kim believes that it could take less than a decade to bring this machine to reality.