
Building A Better Robot
A team of researchers from Harvard University have developed a new actuator composed of soft, rubbery beams. The material is already being applied to robots, allowing them to simulate skeletal muscle movements more closely.
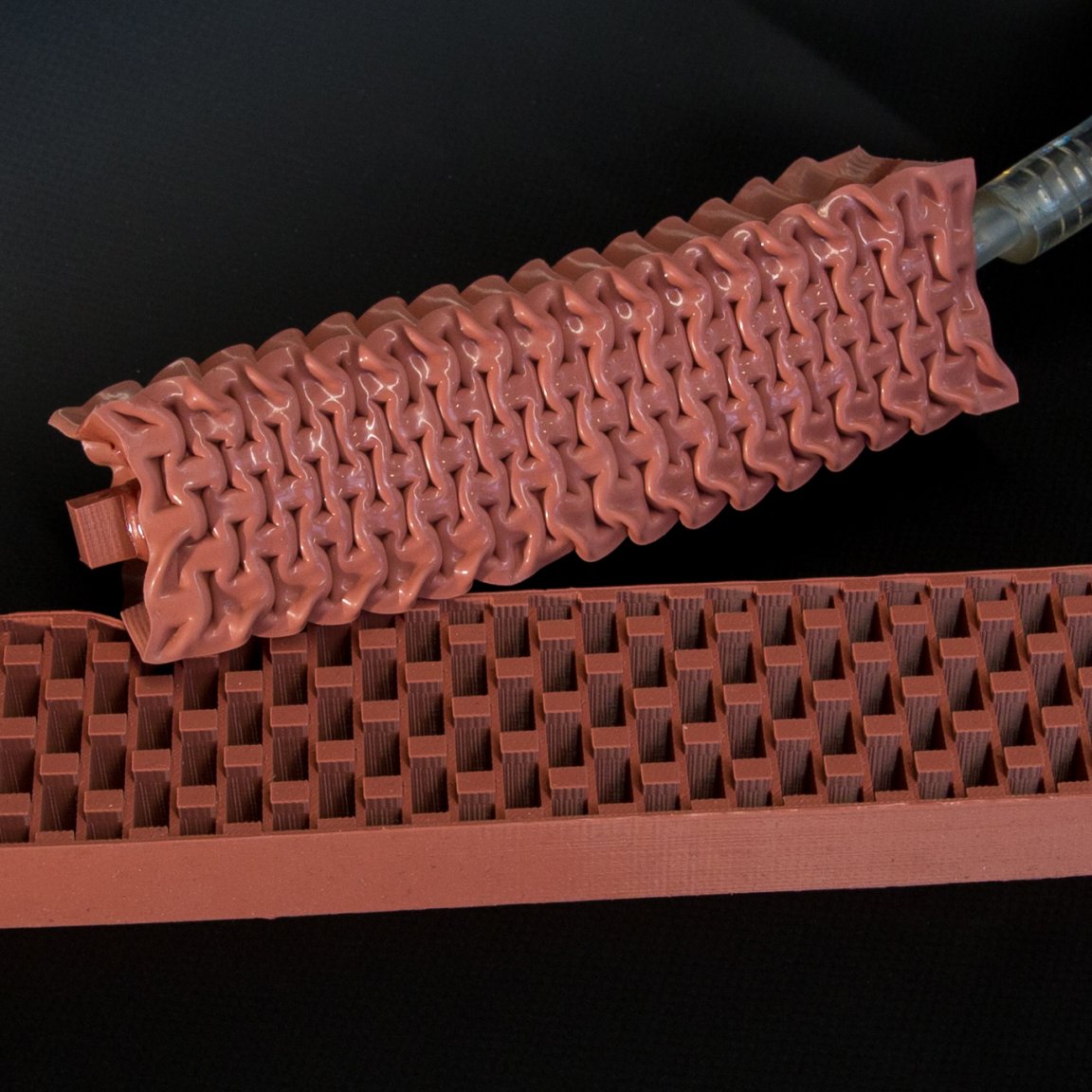
The actuators are mainly composed of a soft rubber called an elastomer. They are formed into beams which are filled with small chambers of air, resembling a honeycomb structure A vacuum accompanies the rubber beam, that when activated, forces the air chambers to collapse, causing the entire structure to contract and generate movement.
The honeycomb pattern can even be altered to enable more specific movements such as twisting, bending, or some combination of these movements. Current applications model the movement of a human bicep.

George Whitesides, Ph. D. (Harvard’s Wyss Institute for Biologically Inspired Engineering), Woodford L. Flowers (Professor of Chemistry, Harvard University’s Faculty of Arts and Sciences [FAS]) , and Anna A. Flowers (Professor of Chemical Biology, Harvard University’s FAS) compose the team behind the project.
The Breakthrough
The idea of buckling in the engineering field points at a material’s mechanical instability and potential point of failure. Whitesides and his team used this to their advantage in their development of the vacuum-actuated muscle-inspired pneumatic structures (VAMPs). The VAMPs mimic muscle contractions more closely, allowing the application of this technology in may confined spaces for a variety of purposes.

The simplicity of the VAMPs enable them to be easily controlled and manipulated. Depending on the planned application, they can be tethered to systems, or left untethered. They are also designed to resist failure as well as carry loads as heavy as 500 grams with ease.
According to Donald Ingber, M.D., Ph. D., the Wyss Founding Director, further development of VAMPs can help bridge the gap between robots and humans, opening newer opportunities in the field of medicine.